所屬科目:教甄◆生活科技專業
1. 在電路中,若將兩個相同的電阻器由串聯改為並聯,則電路的總電阻會如何變化?(A)變大(B)變小(C)不變(D)變為零。
2. 在機械效率中,效率的定義為下列何者?(A)總功 / 有用功(B)有用功 / 總投入功(C)摩擦力 / 推力(D)速度 / 時間。
3. 下列何種手工具適合用來夾持圓柱形狀的工件,且具有調整開口大小的功能?(A)尖嘴鉗(B)斜口鉗(C)水管鉗(D)鋼絲鉗。
4. 在物聯網(IoT)架構中,負責收集環境數據的屬於哪一層?(A)感測層(B)網路層(C)應用層(D)傳輸層。
5. 目前主流的生成式 AI(如 ChatGPT)主要基於哪一種神經網路架構,使其能處理長距離的文字關聯性?(A)CNN(B)RNN(C)Transformer(D)MLP。
6. 在監督式學習(Supervised Learning)的訓練過程中,除了原始數據外,還必須提供什麼資訊給模型?(A)標籤(B)隨機雜訊(C)原始程式碼(D)壓縮編碼。
7. 所謂的圖靈測試(Turing Test)主要是用來評估機器的什麼能力?(A)硬體運算的速度(B)儲存資料的容量(C)展現出與人類難以區分的智慧行為(D)電池續航力與能源效率。
8. 增強學習(Reinforcement Learning)的核心機制主要是透過什麼方式來優化模型的行為?(A)老師直接給予正確答案。(B)透過環境給予的獎勵或懲罰來試錯優化。(C)單純進行資料分群。(D)降低輸入資料的維度。
9. 在電子元件中,具有單向導通特性,常用於整流電路的是下列何者?(A)電阻器(B)二極體(C)電容器(D)電感器。
10. 在運算放大器(OPA)電路中,若其開迴路增益趨近於無限大,且輸入阻抗極高,這種理想狀態下的特性不包括下列何者?(A)虛擬接地(B)輸入電流為零(C)輸出阻抗無限大(D)頻寬無限寬。
11. 下列何種積體電路(IC)常被稱為計時器 IC,可用於產生精確的時間延遲或脈衝訊號?(A)741(B)555(C)7805(D)L298N。
12. 有關支撐物體的結構可分為滾支承(roller support)、鉸支承(pin support)、固定支承(fix support),針對上述三種支撐的敘述,以下敘述何者正確?(A)滾支承(roller support)會滑動也會旋轉。(B)滾支承(roller support)會滑動不會旋轉。(C)鉸支承(pin support)會滑動也會旋轉。(D)鉸支承(pin support)不會滑動也不會旋轉。
13. 有關無線通訊傳輸技術NFC(Near Field Communication),以下敘述何者不正確?(A)使用點對點的模式。(B)可使用非接觸讀卡機。(C)一種短距離的低頻無線通訊技術。(D)可應用於行動支付。
14. PN接面是一種基本的半導體結構。當其接上電壓時,會根據方向產生不同導電結果。下列哪一種說明最接近其行為?(A)正向偏壓時電流被阻斷,反向偏壓才導通。(B)無論電壓方向為何,PN接面皆為導體。(C)正向偏壓時導通,反向偏壓時幾乎不導電。(D)只有當電壓達到12V以上才可能導通。
15. 結構體所受到外力包含各種類的應力,下列何者應力符合繞著物體的軸線施加的力,導致物體產生旋轉或扭轉變形的情況之敘述?(A)拉力(B)壓力(C)彎矩(D)扭力。
16. 某位學生想要設計一組由五根剛性連桿組成的裝置,但實際組裝後發現它雖然是封閉結構,無法稱為機構的主要原因是什麼?(A)每根連桿無法承受外力負載。(B)各桿之間無法產生相對運動。(C)連桿數為奇數,無法平均分配。(D)各桿的運動彼此之間完全無拘束關係。
17. 某位學生在設計自走機器人時,使用四連桿機構讓機器人的前臂能上下擺動。若想讓機構輸出端來回擺動而非連續旋轉,應將哪一根桿件設計為最短?(A)曲柄(輸入桿)(B)搖桿(輸出桿)(C)連桿(中間桿)(D)機架(固定桿)。
18. 有關齒輪種類的分類,以下敘述何者正確?(A)兩軸平行:冠狀齒輪;兩軸相交:尺條與小齒輪;兩軸不平行也不相交:蝸桿與蝸輪。(B)兩軸平行:正齒輪;兩軸相交:冠狀齒輪;兩軸不平行也不相交:戟齒輪。(C)兩軸平行:冠狀齒輪;兩軸相交:蝸桿與蝸輪;兩軸不平行也不相交:直齒斜齒輪。(D)兩軸平行:正齒輪;兩軸相交:直齒斜齒輪;兩軸不平行也不相交:冠狀齒輪。
19. 齒輪的模數(Module)用於表示公制齒輪之齒形大小,如有某正齒輪之齒數 T = 30,節圓直徑D = 15cm,請問該齒輪之模數為多少?(A) 2(B) 3(C) 4(D) 5
20. 常用來以小電流控制大電流的電子元件是?(A)電動機(B)繼電器(C)發光二極體(D)電阻器。
21. 有關常見的各種電阻,以下敘述何者不正確?(A)光敏電阻:光照越亮,電阻值越小。(B)熱敏電阻:溫度越高,電阻值越小。(C)壓敏電阻:電壓越高,電阻值越小。(D)可變電阻:A型電位器為線性尺度式,電阻值的變化與旋轉角度呈線性關係。
22. 在數位邏輯電路中常見的MOSFET是一種利用電壓控制電流的元件。下列關於MOSFET的敘述,何者正確?(A)輸入電流愈大,導通效果愈強。(B)僅能用於交流電的放大與整流。(C)以開極的電壓來控制源極與汲極之間的電流。(D)對電壓非常敏感,因此必須加熱後才能操作。
23. 在單晶片控制器中經常使用 PWM(Pulse Width Modulation)訊號來控制伺服馬達的轉速,請問下列對 PWM 訊號控制的描述,以下敘述何者不正確?(A)訊號是一種方波的形式。(B)被調整的是脈波寬度。(C)將類比訊號電位以數位方式編碼。(D)少數的類比訊號種類才能夠經由PWM的技術編碼。
24. 下列有關 3D 列印材料之特性比較,何者正確?(A)PLA 是石油化學製品,ABS 為玉米澱粉等生物可分解資源製成。(B)ABS 在列印環境溫差過大時容易產生翹曲,PLA 相對較穩定。(C)若將 ABS 的成品及 PLA 的成品放置於夏日陽光直射的汽車中,ABS 的耐熱性較差,較先產生軟化。(D)3D列印完成後,PLA的成品可使用丙酮蒸氣進行表面拋光處理使其變得平滑。
25. 下列有關地震對結構物的影響敘述,何者正確?(A)經濟部公布的土壤液化潛勢區內,建築物都有危險無法居住。(B)在建築物與地基間使用隔震器隔開震波能量是沒有用的。(C)共振現象是指建築物的高度及佔地面積比例會對某種振動頻率產生共鳴,標的物不同共振頻率就不同,但只要當次地震有建築物產生共振,該建築物的結構就會毀壞。(D)地表振動的強度太大才是導致建築物損壞倒塌的最主要原因。
26. 下列有關生態工法的敘述,何者不正確?(A)道路工程包括路面、護欄、邊坡、排水、照明、綠帶等部分。(B)基於對生態系統之深切認知,而採取以利益為基礎、便利為導向的工程方法。(C)工程上更應以低能源使用、低廢棄物產生之綠營建方式施作,包括生態保全、節能、資材、減廢、保水,綠化等全方位考量進行設計。(D)生態工法就是尊重當地天然條件,及人為設施與環境不相衝突前提下,妥適導入人類在環境生活中為提供安全所利用的土木工程構造。
27. 一般常見的手工具老虎鉗,屬於哪一種機構?(A)省力槓桿(B)費力槓桿(C)省時齒輪(D)費時齒輪。
28. 如右圖四環電阻棕黑黑金,這樣代表讀數為何?(A) 10Ω ± 5%(B) 100Ω ± 5%(C) 20Ω ± 10%(D) 200Ω ± 10%
29. 如右圖,這個游標卡尺量測結果讀數為何?(A) 3.36mm(B)3.48mm(C)3.60mm(D)3.72mm
30. 下列有關框架結構及桁架結構的力學敘述,何者正確?(A) 框架結構主要由梁與柱組成,桿件的接點通常設計為剛接。(B) 桁架結構運用在橋樑時,桿件與桿件的接點通常設計為鉸接。(C) 桁架結構可視為多個三角形相接而成的整體結構,具備三角形的穩定特性,比等量材料的框架結構更能跨越大跨距。(D) 以上皆是。
31. 下列有關圓錨機操作原則,何者正確?(A) 調整錨片高度應以高於工件 3mm 為原則。(B) 錨切輔具分為縱切導板及橫切推把,一起使用可確保裁切尺寸精確。(C) 推送工件時應在錨片正後方觀察錨切情形。(D) 縱切寬度過窄時應使用推把推送工件。
32. 內政部營建署訂定《建築物耐震設計規範》,內容包括下列何者?(A) 隔震設計。(B) 減震設計。(C) 擴柱補強設計。(D) 管線系統穿過隔震層須設計其撓性以適應其位移。
33. 有關右圖凸輪各部位名稱,下列何者配對說明正確?(A) B 為從動件位移量。(B) C 為凸輪表面。(C) D 為基圓。(D) E 為壓力角。
34. 機構設計牽涉到機械利益、機械效率,下列敘述何者正確?(A) 機械利益是指輸出力量與輸入力量的比值。(B) 機械效率是輸出功與輸入功的比值。(C) 機械效率高的機械,其機械利益也高。(D) 在理想狀態下,因為沒有摩擦力,機械利益應等於1。
35. 下列關於電腦輔助設計(CAD)與電腦輔助製造(CAM)的系統功能與運作流程敘述何者正確?(A) CAM 系統主要是將設定完成的程式碼轉為機床可執行的加工指令。(B) 在流程先後順序上,CAM 在先、CAD 在後。(C) CAD 程式與 CAM 程式必須安裝在同一台電腦上才能運作,無法透過雲端或檔案傳輸進行協作。(D) CAD 系統建立的模型資料可利用電腦輔助工程(CAE)進行物理特性模擬及工程分析。
1. Mechatronics
2. Human-Machine Interface
3. Morphological Charts
4. Natural Language Processing
5. Automatic Guided Vehicle
二、問答題1. 請比較框架結構(Frame Structure)與薄殼結構(Shell Structure)在受力特性與空間利用上的差異,並各舉一個生活中的實例。(4分)
2. 在進行生活科技課程的橋樑模型製作教學時,若要增加紙製橋樑的抗彎矩能力(增加載重),你會指導學生採取哪些具體的結構強化策略?(請至少列出三項)(5分)
3. 請說明連桿機構(Linkage)中,最基礎的四連桿機構之組成,並解釋何謂葛拉修夫定理(Grashof's Law)?(4分)
4. 在齒輪組傳動中,若主動齒輪(A)的齒數為 20 齒,帶動從動齒輪(B)的齒數為 60 齒,請計算其速比(Speed Ratio)與扭矩(Torque)的變化關係。若 A 輪轉速為1200rpm,請計算 B 輪轉速為何?(4分)
5. 在電子實作中常使用電晶體(BJT)作為電子開關。請說明當電晶體運作在飽和區(Saturation Region)與截止區(Cut-off Region)時的狀態差異,並說明為何不讓其運作在放大區?(5分)
6. 綠建築九大評估指標系統(EEWH)為何?(4分)
7. 智慧建築八大評估指標系統為何?(4分)
8. 機器學習是人們在實踐人工智慧這個目標時所提出的其中一種方式,機器學習若細分為監督式學習 (Supervised Learning)、非監督式學習 (Unsupervised Learning) 與增強式學習 (Reinforcement Learning),其特色分別為何?(5分)
9. 現有一座溫室,為改善通風換氣,裝設 1 台大型風扇,使用220V交流電驅動,並以 Arduino 板控制此風扇每小時進行(抽風 10 分鐘→停止 20 分鐘→排氣 10 分鐘→停止 20 分鐘)的循環,請以此說明畫出風扇運作電路配線圖。(15 分)說明 1:提供模組化零件:Arduino 電路板 1 片(程式碼已經寫入完成);5V 1 路繼電器模組,需要幾個取決於電路設計,也許不必全部用上,但上限為 4 個。說明 2:Arduino 板程式碼(正反轉代表之抽風或排氣不是重點,重點是轉向要相反)說明 3:其他電路零件如電源、電線…等請自行補充繪製。說明 4:電路配線圖請合乎電路繪圖原則。說明 5:整體電路須能正確運作,依完成度給分。
 阿摩線上測驗
登入
阿摩線上測驗
登入
 (A) 10Ω ± 5%(B) 100Ω ± 5%(C) 20Ω ± 10%(D) 200Ω ± 10%
(A) 10Ω ± 5%(B) 100Ω ± 5%(C) 20Ω ± 10%(D) 200Ω ± 10%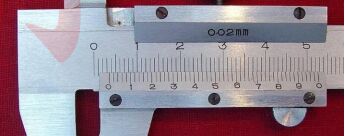 (A) 3.36mm(B)3.48mm(C)3.60mm(D)3.72mm
(A) 3.36mm(B)3.48mm(C)3.60mm(D)3.72mm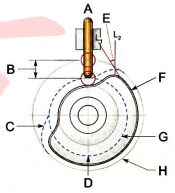 (A) B 為從動件位移量。(B) C 為凸輪表面。(C) D 為基圓。(D) E 為壓力角。
(A) B 為從動件位移量。(B) C 為凸輪表面。(C) D 為基圓。(D) E 為壓力角。

